由于空调系统的设计都是按最不利情况(最大负荷)考虑的,而实际运行时能达到满负荷状况只占10%。如果不对空调的运行设备, 尤其是中央制冷系统进行相应的调节, 那么将会影响整个空调系统的调节品质,浪费能源和费用,并且这些设备也不是在最佳工况下运行, 无法满足对舒适性的要求。现代大型公共建筑多数其中空调、制冷与供热设备占40%。将自动控制用于暖通空调系统已势在必行采用自动控制可以使系统节约 10%~15% 的运行费用,有的系统可以高达25%~30%。[1]
在暖通空调系统的过程控制中,控制对象非常复杂,有些控制环节表现出很强的时滞、时变、非线性的特性,目前HVAC系统温度、湿度、空气污染度 分别独立控制,控制器都是采用PID控制器,并且控制器参数是固定的。外界环境发生变化,特别是在湿度和房间负荷变化较大,其送风温度和静压力的控制效果 差。由于空调控制系统的被控对象是房间的温度场,它与空调进行换热的工况相当复杂,制约因素太多,对这种大滞后、强扰动且被控对象未知或是时变的系统实施 常规PID控制往往效果欠佳。因此,需对PID参数进行整定以获得最佳控制参数。[2]
1 空调系统的控制原理
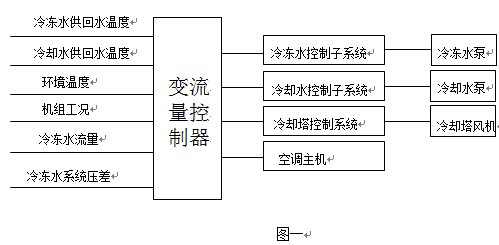
以中央空调水系统的自动控制系统为例,其他如风系统、冷冻水系统、冷却水系统类似。
因为定流量控制存在很大的能源浪费,因此在暖通空调系统中通常对水泵、风机、冷水机组进行变流量控制。控制系统中通过采集系统中的流量、温度等 参数,并通过模糊运算得到与之对应的控制参数。各空调系统再根据这些控制参数的变化利用变频技术,改变系统的流量,温度等。从而使整个空调系统始终处于最 高效的运行状态。如下图[3]
2 模糊PID控制技术原理
2.1 简述传统PID控制
在自动控制系统中,控制器是很重要的组成部分。控制器将系统的被控变量与给定值进行比较,得到偏差,然后把某种特定的控制规律(即控制器的输入 信号变化规律),控制生产过程,使被控变量等于给定值。连续控制规律可以分为比例、比例积分、比例微分和比例积分微分控制规律。比例、积分、微分分别用 P、I、D表示。因此PID控制就是比例积分微分控制。比例调节的显著特点是有差调节,静差不可避免,随干扰变化而变化。为能自动消除静差,需要采用比例 积分控制器。而为了提高控制系统的过渡过程的品质指标,可以采用比例微分控制器。微分调节具有预见性,能抑制被调量的振荡,提高系统稳定性。因此PID控 制配合了三种调节作用,既消除了静差,又可以提高系统的动态品质指标。[4]
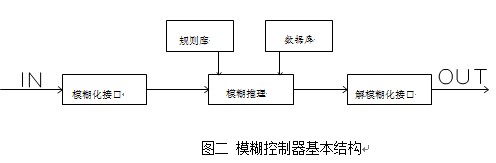
2.2 模糊控制器基本结构
结构如图
2.3 模糊化接口
在推理前,要将输入控制器的清晰值转化为模糊集合的形式。人为设定各模糊子集
1) e=负大,负小,零,正小,正大=NB,NS,ZO,PS,PB。2) e=负大,负中,负小,零,正小,正中,正大=NB,NM,NS,ZO,PS,PM,PB。3) e=负大,负中,负小,零负,零正,正小,正中,正大=NB,NM,NS,NZ,PZ,PS,PM,PB。
2.4 模糊PID模糊控制规则的建立
规则的建立是从人的直觉思维出发,推理而来的一种语言表现形式,并且依靠相关的专业人士凭借多年累计的经验和专业知识。模糊规则通常由一系列的 关系词连接而成,如if-then,else, also, and, or 等,例如:if A then B 语句。规则库用来存放全部模糊控制规则
2.5 模糊推理
模糊推理是根据模糊控制规则来解模糊关系方程,以此得到模糊控制量。模糊推理由条件聚合、推断和累加组成
2.6 解模糊化接口
将推理得到的模糊集合转化成清晰值,然后将得到的结果传递给执行机构。去模糊方法一般有重心法、中心平均法和最大值法。法
3 模糊PID控制器的设计图[5]
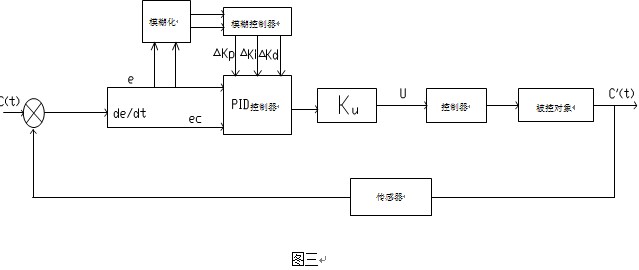
模糊PID控制的设计思想是找到PID控制器三个参数与温度偏差e和温度偏差变化率ec之间对应的模糊关系在线自整定参数Δkp ,Δki ,Δkd 值, 在运行中通过不断检测e和ec,再对3个参数kp , ki , kd进行在线校正,以满足在不同偏差e和偏差变化率ec时,对控制器参数的不同要求,从而使被控对象有良好的动、静态性能, 而且计算量小,易于单片机的实现。
一般来说有如下规律:
当| e | 较大时, kp取较大的值、kd较小的值,为抑制可能出现的过饱和,应对积分ki 加以限制( ki = 0) 。
当| e | 为中等大小时,kp取较小的值,适当的ki 和kd ,同时保证系统有较快的响应速度, kd的取值应尤为关注。
当| e | 较小时, kp 和ki 应取较大的值;同时为抑制控制系统在设定值附近出现震荡,并考虑系统的抗干扰性能,当| ec | 的值较小时, kd 通常取值为中等大小;当| ec | 的值较大时, kd 的值可以取小一些。
4 仿真研究[6]
自动控制空调系统的主要任务是维持空调房间的温、湿度在工艺要求的范围内。空调房间就是空调系统的被控对象。其传递函数为:G(s) Keτ0s/T0s+1
式中:G(S)为对象传递函数,K 为对象静态放大系数,τ0 为对象纯滞后时间,T0 为对象时间常数。如采用传统的PID 控制,只要τ0、T0 改变,要重新设计Kp、Ki、Ku 的PID 控制器。采用模糊控制在线对参数调整,不用都重新设计PID 控制器。
通过研究发现,可以看出模型参数变化后模糊PID 控制的阶跃响应曲线基本没有变化,而普通PID 的控制曲线却发生了较大变化。
5 结论
本文对空调系统的控制系统进行了分析,并通过仿真研究,证实了模糊PID控制提高了控制系统的静态性能和动态性能,使温室的温度控制系统具有较 强的鲁棒性(Robust,表示当一个控制系统中的参数发生摄动时系统能否保持正常工作的一种特性或属性),自适应性;有效地解决了温室温度控制系统的存 在的滞后性强、超调量大等问题。从而提高了能源利用率。