一、前言
为实现对室温的控制,要对室温进行监控。由于室温与湿度、围护结构及其冷风等因素有关,采用传统PID控制很难达到预定要求。本次设计采用模糊控制技术对室温进行控制,将预定值与实际室温比较,得出控制量及其方法,使其达到设定值。
二、室温模糊控制器设计
本设计引入模糊智能控制器、流量控制阀。采用双输入单输出的模糊控制结构,流量控制器实际入口温度值为 ,给定标准温度值为
,给定标准温度值为 ,偏差为
,偏差为 。输入量经过模糊化后输入到推理机后清晰化输出控制量U,即分别作为控制阀门的正转和反转开关量和控制阀门开度的脉冲量个数,之后采用比例因子来调节暖气流量。调节规则如下:
。输入量经过模糊化后输入到推理机后清晰化输出控制量U,即分别作为控制阀门的正转和反转开关量和控制阀门开度的脉冲量个数,之后采用比例因子来调节暖气流量。调节规则如下:
(1)>0,表示房间温度值偏低,则开大流量控制器阀门,使热水供给量增加,提高 值;
值;
(2)<0,表示房间温度值偏高,则开小流量控制器阀门,使热水供给量减少,减小 值。
值。
通过不断调整,使值渐趋于0,实际室温由于各种因素会在设定温度值附近波动,保证系统供热稳定。实际住宅供热系统中,不同的时间与天气对应不同的设定温度值,本设计中设定温度的标准值为23。
根据智能调节阀输入信号、开度和数据流量,流量和开度是非线性关系,参考了2012中国建筑节能年度发展研究报告中关于调节阀与房间温度的研究报告,能得到阀门流量与房间温度的广义对象的传递函数为(2-1)所示:
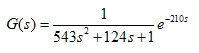
(2-1)示
一维模糊智能控制器的输入为温度误差。误差的模糊论域为[-6,+6],模糊集取{NB,NS,ZO,PS,PB}。根据 =
= 、
、 =
= ,可求出和的量化因子,根据控制要求,
,可求出和的量化因子,根据控制要求, =4,
=4, 则量化因子为:
则量化因子为: 考虑对论域的覆盖程度和灵敏度与鲁棒性原则,
考虑对论域的覆盖程度和灵敏度与鲁棒性原则, 的隶属函数选用三角形隶属函数。
的隶属函数选用三角形隶属函数。
系统采用负偏差逻辑,即偏差 ,偏差变化率
,偏差变化率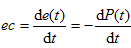 。由于设计要求为无静差控制系统,被控对象具有惯性特征,为达到设计要求,因此采用二维模糊控制器。
。由于设计要求为无静差控制系统,被控对象具有惯性特征,为达到设计要求,因此采用二维模糊控制器。
输入量输出量的模糊化
(1)确定输入输出语言变量
设计模糊控制系统首先要明确模糊输入、输出变量及其相应的模糊取值,包括隶属度函数,室温控制系统的模糊输入确定为温度的偏差和偏差的变化。设目标温度为A,实测温度为B,则偏差 ,偏差的变化为
,偏差的变化为 。
。
输入语言变量选用实际温度与设定温度的偏差及其偏差变化率△e,把各控制量作为输出的语言变量。根据室温情况,输入输出语言变量都选取7个语言值:PL(正的大温度偏差),PM(正的中温度偏差),PS(正的小温度偏差),ZO(零温度偏差),NS(负的小温度偏差),NM(负的中温度偏差),NL(负的大温度偏差)。根据室温的情况,对于温度模糊控制输入及输出的语言的模糊子集确定为:
计算机实现模糊控制算法进行模糊控制时,将每次采样所得数据经计算机处理,成为模糊控制器的输入变量。为实现模糊化处理,将输入变量的基本论域乘以相应的 量化因子转换到相应的模糊集的论域,再将模糊控制算法给出的控制量乘以因子,将其转换到控制对象能够接受的基本论域。设偏差的量化因子为,偏差变化的量化因子为,输出变量的比例因子为,偏差和偏差的变化分别量化为和,输出变量为。一维模糊控制系统示意图如图2.3所示:
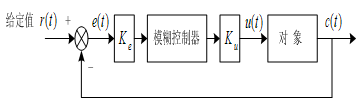
图2.3 模糊控制器示意图
对于设定偏差 、
、 的论域X,将误差大小量化为9个等级,既是:X={-1、-2、-3、-4、-5、-6、0、1、2、3、4、5、6}。对于控制量的论域Y,其控制器可以量化为9个,即为Y={-1、-2、-3、-4、-5、-6、0、1、2、3、4、5、6}。对于输入输出变量模糊子集的定义关键是确定隶属函数,在确定隶属函数时掌握的原则是:a. 表示隶属函数的模糊集必须是凸模糊集;b. 变量所选取的隶属函数通常是对称和平衡的;c. 隶属函数要遵从语义顺序;d. 论域中的每个点应该至少属于一个隶属函数的区域,至多两个隶属函数的区域;e. 对同一个点没有两个隶属函数会同时有最大隶属度;f. 当两个隶属函数重叠时,重叠部分的任何点的隶属函数的和应该小于等于1,根据以上的原则,以及简化计算选择三角形隶属函数。
的论域X,将误差大小量化为9个等级,既是:X={-1、-2、-3、-4、-5、-6、0、1、2、3、4、5、6}。对于控制量的论域Y,其控制器可以量化为9个,即为Y={-1、-2、-3、-4、-5、-6、0、1、2、3、4、5、6}。对于输入输出变量模糊子集的定义关键是确定隶属函数,在确定隶属函数时掌握的原则是:a. 表示隶属函数的模糊集必须是凸模糊集;b. 变量所选取的隶属函数通常是对称和平衡的;c. 隶属函数要遵从语义顺序;d. 论域中的每个点应该至少属于一个隶属函数的区域,至多两个隶属函数的区域;e. 对同一个点没有两个隶属函数会同时有最大隶属度;f. 当两个隶属函数重叠时,重叠部分的任何点的隶属函数的和应该小于等于1,根据以上的原则,以及简化计算选择三角形隶属函数。
表2.1 模糊控制规律图
|
|
|
|||||||
|
NL |
NM |
NS |
ZO |
PS |
PM |
PL |
||

|
NL |
NL |
NL |
NL |
NL |
NM |
NS |
ZO |
|
NM |
NL |
NL |
NM |
NM |
NS |
ZO |
ZO |
|
|
NS |
NL |
NM |
NM |
NS |
ZO |
ZO |
PS |
|
|
ZO |
NM |
NS |
NS |
ZO |
PS |
PS |
PM |
|
|
PS |
NS |
ZO |
ZO |
PS |
PM |
PM |
PL |
|
|
PM |
ZO |
ZO |
PS |
PM |
PM |
PL |
PL |
|
|
PL |
ZO |
PS |
PM |
PL |
PL |
PL |
PL |
|


取输出 的基本论域为{-0.06,0.06},
的基本论域为{-0.06,0.06}, 的模糊论域取[-6,+6],模糊集
的模糊论域取[-6,+6],模糊集 为{NB,NS,ZO,PS,PB},控制量
为{NB,NS,ZO,PS,PB},控制量 的论域为[4,20]mA,其最大值为20mA,最大增量
的论域为[4,20]mA,其最大值为20mA,最大增量 一般是
一般是 最大值的2%,如选
最大值的2%,如选 为5×2%=0.2,那么
为5×2%=0.2,那么 的初选值为
的初选值为 。
。 的隶属函数也选择为三角形隶属函数
的隶属函数也选择为三角形隶属函数
可得比例因子 =0.0189。的隶属函数选择为三角形隶属函数。反模糊化采用重心法,即(2-2)式:
=0.0189。的隶属函数选择为三角形隶属函数。反模糊化采用重心法,即(2-2)式:
(2-2)示
为第n条规则结论部分隶属函数的特征值, 是第n条规则的输出控制量模糊集的隶属度。控制器采用增量形式,即:
是第n条规则的输出控制量模糊集的隶属度。控制器采用增量形式,即: ,可得控制查询表如表2所示。当偏差达一定量小时,引起静差,为消除静差,引入
,可得控制查询表如表2所示。当偏差达一定量小时,引起静差,为消除静差,引入 量,所以总输出可以表示为
量,所以总输出可以表示为  。
。
三、结语
本文提出的模糊控制理论技术,是基于模糊控制理论进行模糊控制器的设计及其模糊推理方法,并结合相应的算法算术平均值与分批估计相结合的融合算法,对室温数据进行实验,在数据测量的精确度有了很大的提高。