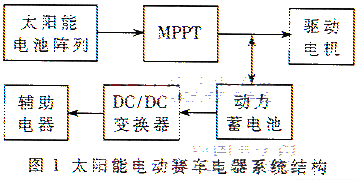
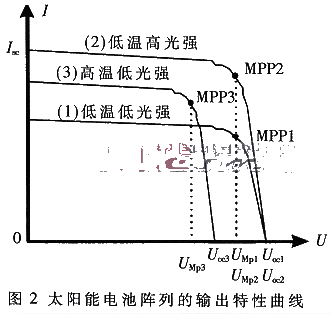
太阳能赛车是利用太阳能电池发电驱动的电动车。太阳能电动赛车的电器系统基本结构如图1所示。 MPPT(Maximum Power Point Tracker)即峰值功率跟踪器,是太阳能电池发电系统中的重要部件。众所周知,在确定的外部条件下,随着负载的变化,太阳能电池阵列输出功率也会变 化,但是存在一个最大功率点Pm以及与最大功率点相对应的电压UMp和电流IMD。当工作环境变化时,特别是日光照度和环境温度变化时,太阳能电池阵列的 输出特性曲线也随之变化,与之相对应的最大功率点也随之改变,如图2所示。通常来讲,太阳能电池输出特性曲线的变化与日光照度的变化是成比例的。但在实际 应用中,日光照度的变化再加上工作温度的变化,使得太阳能电池输出特性的变化很复杂。
在太阳能发电系统中没有采用MPPT,而是直接把太阳能电池阵列与蓄电池并联工作时,由于阵列的输出状态受到电池、电机工作状态的限制,输出功率往往不在 阵列的最大功率点。MPPT的作用是使太阳能电池阵列工作在最大输出功率点。它是高效率的DC/DC变换器,相当于太阳能电池输出端的阻抗变换器。 MPPT是太阳能车、太阳能发电系统、太阳能水泵上常用的功率提升部件。MPPT能使太阳能电池阵列的输出功率增加约15%~36%。
1 太阳能赛车的MPPT方案设计
本文所述MPPT是为清华大学“追日号”太阳能赛车研制的。“追日号”太阳能赛车的太阳能电池阵列总面积为6.67m2,最大输出功率为825W,开路电 压在160V~170V之间,根据太阳能电池阵列输出特性试验,得到阵列最大功率点电压在129.6V~137.7V之间。由此确定蓄电池组由10个 12V/20Ah(5小时放电率)的铅酸蓄电池串联组成,额定电压为120V,工作电压在120V~140V之间。蓄电池工作电压在太阳能电池阵列的最大 功率点电压附近。 MPPT要实现太阳能电池工作电压到蓄电池电压转换,其本身是需要消耗能量的;同时MPPT应用在“追日号”太阳能车上,它的重量将增加整车功率的消耗。 如果MPPT的转换效率过低,应用MPPT所获得的太阳能电池阵列输出功率的增加有可能被MPPT本身消耗掉,甚至起反作用。在工作中,由于日光照度、温 度等的变化,太阳能电池阵列的最大功率点(MPP)将随工作环境的变化而时刻变动着,MPPT必须随时监测阵列输出状态的变化,根据智能的控制策略判断最 大功率点的位置,调整阵列的工作电压跟踪最大功率点电压,由此实现MPPT的功能。因此,MPPT不仅是一个高效率的DC/DC转换器,更是一个智能的控 制系统。
1.1 MPPT的硬件设计
MPPT的硬件包括MPPT主回路、微处理器、信号调理电路、PWM驱动电路、电源、通信接口等六个部分。其硬件结构如图3所示。 MPPT的电压转换器采用Buck DC/DC转换器,以MOTOROLA场效应管作为电子开关器件;采用PWM控制方式,工作频率为16kHz。由上述的太阳能电池阵列电压与蓄电池电压可 知,MPPT的Buck DC/DC转换器的降压比在0.6~1.0之间。在这个降压比范围内,MPPT的转换效率在86%~99%之间。 由于采用了Buck DC/DC转换器,在太阳能电池阵列的工作电压高于蓄电池电压的情况下,通过调整BuckDC/DC转换器的占空比即可改变太阳能电池阵列的工作电压 [3]。MPPT的Buck DC/DC转换器的电感上L=4mH,临界负载电流Iok为: Iok=(Vout/2Lf)/(1-D) Iok|D=0.7=120V/(2%26;#215;4mH%26;#215;13kHz)(1-0.7)≈0.35A 当电流I0.35A、占空比D0.7时,
在场效应管开关的一个周期内,电感的电流是连续的,则Buck DC/DC转换器的降压比等于PWM控制信号的占空比。所以MPPT的控制策略是通过调整PWM的占空比D来调整Buck DC/DC转换器的降压比,以达到调整太阳能电池阵列工作电压为最大功率点(MPP)电压的目的。 MPPT微处理器的工作步骤是:首先采集MPPT主回路的电压及电流信号,然后根据最大功率点跟踪策略判断最大功率点的位置,确定PWM信号占空比D的 值,最后输出PWM信号给驱动电路。微处理器是MPPT的控制核心,这里采用飞利浦80C552单片机来实现MPPT的控制。而且微处理器可以通过 RS232接口与PC机连接,实现MPPT和PC机之间信息的交换。 在信号调理电路部分,设计了线性光耦电路来实现信号的隔离与放大,以保证微处理器部分免受干扰。

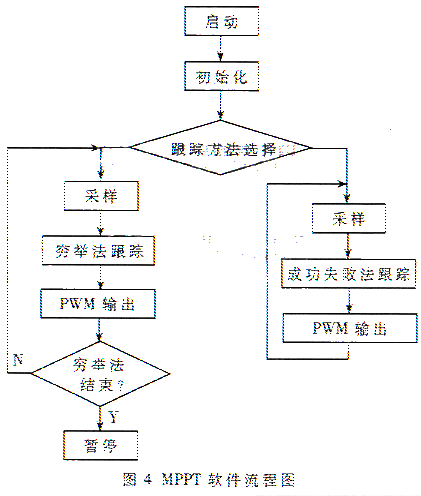
1.2 MPPT的软件设计
MPPT的软件采用模块化结构,包括初始化、采样、穷举法跟踪、成功失败法跟踪、PWM输出、串口通讯等模块。系统程序流程图如图4所示。
MPPT最大功率点的跟踪程序分为穷举法和成功失败法两种,MPPT依据太阳能车不同的运行情况,分别调用这两种最大功率点跟踪程序,以实现MPPT的功能。
2 MPPT最大功率点跟踪策略
由于光电转换过程的物理方程难以在实际应用中准确获取参数,同时太阳能电池阵列的工作条件是不断变化着的,因而太阳能电池阵列的输出特性方程在太阳能车的应用中成为一个存在极大值的约束不确定方程。因此MPPT的最优化问题采用直接搜索法求取。