随着中国改革开放的持续深入以及产品升级的不断加速,中国的汽车产量已跃居全球领先地位,生产企业的数量不断增加,国内汽车保有量持续增加,汽车市场将逐渐趋于饱和。市场竞争加剧,人们对于产品品质、种类等各方面的要求不断提高。这些都要求汽车生产企业尽可能应用现有设备快速生产出多种类型的产品,同时,要求设备生产厂商能提供“柔性、适合多种型号产品混合生产”的柔性生产线。此外,对一些生产场地受限制的场合,汽车企业迫切需要实现用尽可能少的生产场地完成产品的生产制造。
为满足柔性制造的需求并保证生产质量,汽车生产企业大量使用了工业机器人作为其主要生产设备,但对于产品的传输方面,多年来一直未有太大的改进,不能很好地适应多车型、高节拍的连续性生产。对此,我们基于机器人技术开发了一种全新的车身传输系统(柔性小车),并在汽车生产厂焊装车间成功地使用。相对于传统的滚床和Shuttle传输方式,柔性小车将其二者的优点合二为一,克服了滚床和Shuttle传输线自身的一些不足。
车身传输系统
传统的车身传输系统所采用的主要驱动方式:变频调速与传感器加机械定位销定位的不足之处在于,瞬态影响慢、闭环控制精度一般,无法实现空间多个坐标系的动态拟合计算,为此,我们引入了基于机器人控制技术的伺服控制及定位方式来解决这一问题。
1、变频传动
常用的变频器只是调节交流异步电动机的速度,可采用开环或闭环控制方式,变频器通过内部的数学模型,将交流电动机的定子磁场转化为可以控制电动机转速和转矩的两个电流的分量,并对每相的输出电流进行检测,采样反馈后构成闭环负反馈的电流环的PID调节。某些变频器(如,ABB、FANUC)还提出了直接转矩控制技术,同时控制电动机的速度和力矩,以提高控制精度和相应特性。
2、伺服传动
伺服传动基本上都采用闭环方式控制同步伺服电动机,相对于变频方式的电流环、速度环,伺服控制还引入位置环,伺服控制器有比变频器更精确的控制算法,能够实现非常精确的位置控制。但其价格相对于变频器来说要昂贵。伺服传动的优势在于:瞬态影响快,过载能力强,定位精度高。目前机器人电动机均采用此控制方式。
3、电动机
伺服电动机的材料、结构和加工工艺远远高于变频器驱动的交流电动机,其瞬态影响远优于变频电动机。当驱动器输出变化很快的电流、电压和频率时,伺服电动机能快速做出响应,响应特性和抗过载能力远高于变频器驱动的交流电动机。例如,伺服电动机一般的加速时间为20ms,能承受3倍的过载,而变频电动机的加速时间则要长很多,普遍在几百毫秒或以上,过载能力也仅有1~1.5倍,但因其价格低廉,在常规传动领域一直是主流的方式。
4、工业机器人技术
它是集运动学、动力控制、位置控制及智能传感等多学科为一体的高新技术,也是我国近年来发展的重点。工业机器人采用伺服控制作为其传动控制方式,以实现其优异的性能及精度。
柔性小车是新近开发并投入使用的一种基于机器人技术的设备,它和机器人一样具有很高的定位精度和很好的瞬态响应。作为最基本也是最常用的方式是将其作为传输装置,取代原有的滚床和Shuttle传输线,它和滚床一样能够在某个工位发生故障时继续运行后续工位,避免全线停产的事故。同时,它也具有Shuttle传输线快速高效定位准确的特点,相对于Shuttle传输线,柔性小车具有很高的柔性,能适应多种车型的传输。我们使用机器人的标准伺服控制系统和软件同时控制机器人与传输装置(柔性小车)的方法,实现了高性能与低成本的融合。
在机器人技术中,有多种多样的运动模型供我们选用,对于常见的没有旋转轴的柔性车身传输,我们采用了如图1所示的运动模型,该运动模型的特点是计算简单,能满足一般的应用。加入了第3个平移轴后的运动学模型如图2所示。对于加入了旋转轴的小车我们采用如图3所示的运动模型。
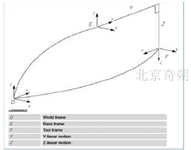
图1 常见的柔性车身传输运动模型
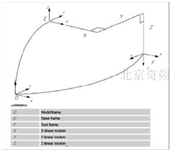
图2 加入第3个平移轴后的运动学模型
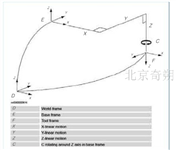
图3 加入旋转轴的运动模型
标准的机器人控制系统所提供的成熟的运动学模型有助于快速方便地将传输装置(柔性小车)的运动与机器人的运动予同步联动,实现更快、更准的运动控制。作为该技术的标准化机器人应用常见于机器人外部扩展轴(WXTERNAL-AXIS),以实现机器人更大范围的运动和柔性化。该技术使用原始的机器人控制器并增加外部轴(EXTERNAL-AXIS)来驱动机器人(见图4)。

图4 外部扩展轴
柔性传输系统
柔性传输系统是将机器人控制技术的优势进行整合,并应于传输系统——柔性传输导轨(FlexTrack)(见图5、图6和图7),其优点主要表现在:舍弃了以往标准的机运模式,使用联动伺服轴,电器机械配合机器人,从而起到节省投资、节约空间以及减少人力劳动和设计成本的作用。只有很少的电器机械部件和传输单元需要安装,从而减少了工位转换的时间。因为很多主要的设备调试在前期就可完成,这一效果在后续的工位建立上将得到更大的提现。同时,可以建立一个混合的系统去迎合各种要求,从而解决了柔性的瓶颈。与传统自动化传输系统不同,这种柔性度的提现是不需要额外投资支持的。另外,充分考虑了操作者上下料的因素,符合人体工程学设计。

图5 机器人岛的柔性传输系统

图6 模块化多工位柔性传输系统

图7 单方向柔性传输系统
柔性传输系统与常用的传输系统对比
通过如表所示的柔性传输系统与常用传输系统的对比可以看出,柔性小车在定位精度、适应车型、编程和柔性等方面均优于传统方式。

表 柔性小车与常用传输装置的比较
1、滚床
一般来说,一种滚床只能适用于一种车身底板,滚床的运动靠装在工装平台上的轮子摩擦前行,轮子一般由变频器控制,定位和加减速依靠传感器,定位精度较差,同时由于每个滚床制造时会产生误差,因此多个滚床的机械尺寸无法做到完全一致。此外,滚床需要一条专用的运输线将空滚床从生产线的出口回送至生产线的入口以实现循环使用(见图8)。

图8 滚床全貌
2、Shuttle线
Shuttle线作为汽车生产厂最常用的一种车身传输方式,具有传输快、定位准的优点,但同时又无法同时兼容多车型、柔性差的缺点(见图9).

图9 Shuttle线
3、柔性小车
随着伺服控制系统价格的逐步降低,以伺服控制为基础的柔性小车作为新一带柔性传输装置的优势逐步得到体现。在柔性小车上可以安装现场总线模块以及机械切换装置适应于不同的车身底板,小车的移动位置可编程,得益于高精度的伺服控制系统,柔性小车无需加减速及其他传感器即能实现快速准确的定位,可以满足不同场合的需求。此外,柔性小车可利用现有机器人的标准控制系统与机器人现有成熟的控制指令,不必单独组建控制系统。由于机器人与柔性小车使用了同一控制系统,因此能轻易实现柔性小车与 机器人运动的同步,在降低成本与占地面积的同时也大幅提升了设备的性能(见图10).

图10 装有切换装置适应多车型共用的柔性小车
柔性传输系统的其他用途
1、作为柔性工装使用
对于生产场地面积受限制的用户,柔性小车作为机器人的外轴与机器人实现同步运动,能够与机器人控制器融合为一体,实现坐标系移动。由于机器人的运动和柔性小车的运动同一由机器人控制器进行运算,因此相对于传统方式,也改善了机器人工具(如焊钳)的可达性。由于柔性小车可以接入现场总线、压缩空气、传感器和其他执行机构,因此,能利用很少的工位实现原先需要多个工位才能完成的工作,减少了投资,提高了设备的利用率,并减少了设备的占地空间。
2、作为工具或设备的载体
柔性小车能快速准确地移动到多个位置,这一功能使多台机器人或多个工位公用一个工具或设备成为可能,机器人可以通过工具更换装置有选择地抓取或存放工具,柔性小车快速精确地运动使工具能在几台机器人间快速传送,避免了重复购买类似的工具或设备,节省惯了费用。
结语
综上所述,柔性小车具有定位精确、快速及位置可编程等优点,与传统的传输设备相比能适应车型的随机快速切换,在生产线改造或增加车型时,其“柔性”优点更加突出,明显缩短了改造停产时间,保证新产品早日投放市场。
与众不同的全封闭性设计的柔性小车拖链内藏,美观整洁、易于维护,从根本上结局了现场铁屑、焊渣等杂物堆设备造成的损坏。
在技术日新月异的今天,柔性小车技术已日趋成熟,在多个汽车企业(如福特、东风、中国重汽、北汽和南汽等)得到了成功的应用,我们希望该技术能帮助汽车企业在生产上获得更好的收益。